

Забудьте о пчелах. Исследователи Массачусетского технологического института разработали насекомое-робота, предназначенное для искусственного опыления, заложив основу для полностью закрытых ферм будущего.
Живые хлопающие крылья робота имитируют природные, что позволяет крошечному воздушному роботу весить меньше грамма. Маневренная и устойчивая новая модель представляет собой значительное достижение в области малогабаритной робототехники.
На крытой ферме будут выращиваться фрукты и овощи в многоуровневом складе, что позволит увеличить урожайность с одного акра и свести к минимуму воздействие окружающей среды благодаря контролируемой системе замкнутого цикла.
В таких условиях насекомые-роботы будут жить в механических ульях и разворачиваться в рои для синхронного опыления. Однако разрабатываемые в настоящее время роботы-насекомые все еще не могут сравниться с природными пчелами по скорости, маневренности и выносливости.
Роботизированная ферма будущего
Команда робототехников Массачусетского технологического института из Новой Англии уже некоторое время совершенствует свои разработки. Ранние прототипы включали в себя гораздо более хрупкое создание, состоящее из четырех одинаковых двукрылых устройств, собранных в восьмикрылое кольцо размером с микрокассету.
«Но нет ни одного насекомого с восемью крыльями. В нашей старой конструкции производительность каждого отдельного блока всегда была лучше, чем собранного робота», — говорит Кевин Чен, доцент кафедры электротехники и вычислительной техники Массачусетского технологического института (EECS) и руководитель лаборатории мягкой и микроробототехники в составе Исследовательской лаборатории электроники (RLE). Чен является старшим автором статьи о новой конструкции, находящейся в открытом доступе.
Проанализировав предыдущие результаты работы робота, команда обнаружила, что из-за особенностей конструкции крылья мешали друг другу, поскольку их воздушные потоки сталкивались. Кроме того, приводы, работающие как искусственные мышцы, часто сгибались при высокочастотных движениях, необходимых для полета насекомого.
Для решения этих проблем команда обратилась за вдохновением к природе, стремясь преодолеть разрыв между естественными и роботизированными характеристиками. Обновленное роботизированное насекомое теперь может парить почти 17 минут — это более чем в 100 раз лучше, чем у предыдущих моделей.
Знаковый испытательный полет
«Когда мой ученик Немо совершал этот полет, он сказал, что это были самые медленные 1000 секунд, которые он провел за всю свою жизнь. Эксперимент был крайне нервным», — объясняет Чен.
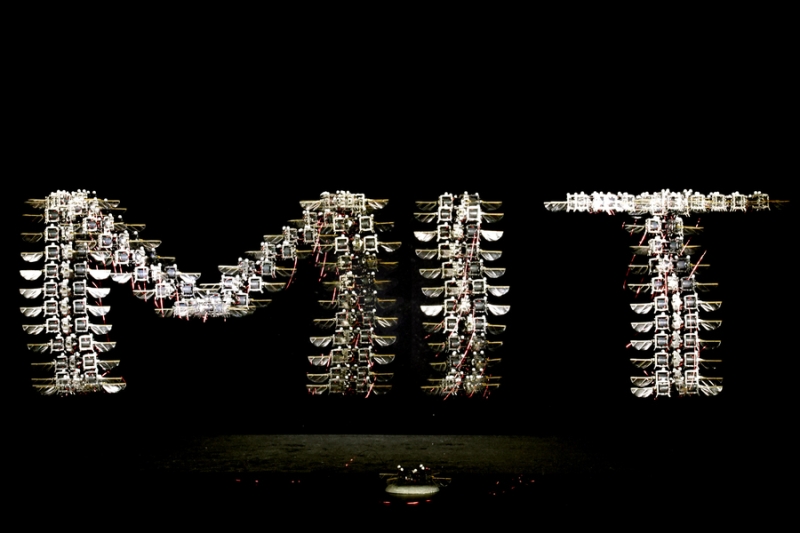
В ходе впечатляющей демонстрации команда управляла крошечным насекомым-роботом, чтобы он произносил букву «М-И-Т» во время маневров полета, включавших перевороты и двойные перевороты.
«В конце концов, мы продемонстрировали полет, который в 100 раз дольше, чем кто-либо другой в этой области, так что это чрезвычайно захватывающий результат», — заметил Чен.
Расширяя границы технологии роботизированных насекомых
Новое роботизированное насекомое обладает малым весом и высокой маневренностью, способно выполнять такие сложные движения, как двойное сальто, сохраняя при этом свою устойчивость. Робот весит меньше скрепки и создан таким образом, чтобы минимизировать нагрузку на его нежные крылья, обеспечивая при этом максимальную точность и маневренность.
«Продолжительность полета, которую мы показали в этой работе, вероятно, больше, чем все полеты, которые нам удалось накопить с помощью этих роботизированных насекомых. Благодаря увеличению продолжительности жизни и точности полета робота мы приближаемся к таким интересным приложениям, как вспомогательное опыление», — говорит Чен.
Усовершенствование конструкции
В новой конструкции по-прежнему используются четыре одинаковых блока, но каждый из них имеет только одно крыло, ориентированное в сторону от центра. Каждый блок включает в себя шарнирное крыло, мягкий мускульный привод и систему передачи. Такая конфигурация повышает устойчивость и освобождает пространство для размещения электронных датчиков или батарей. Команда также разработала более сложную, но прочную систему трансмиссии с удлиненной конструкцией шарниров, чтобы уменьшить нагрузку на крылья.
«По сравнению со старым роботом мы можем генерировать управляющий момент в три раза больше, чем раньше, поэтому мы можем выполнять очень сложные и точные полеты с поиском траектории», — объясняет Чен.
Следующие шаги в инновациях роботов-насекомых
Несмотря на эти достижения, команда признает, что их роботы все еще далеки от того, чтобы сравниться с настоящими пчелами, которые полагаются на сложную систему тонко контролируемых мышц для маневрирования своими крыльями.
«Очень сложный набор мышц управляет крыльями пчел. Этот уровень тонкой настройки нас очень интригует, но мы пока не смогли его воспроизвести», — комментирует Чен.
Следующая цель команды — увеличить продолжительность полета робота в десять раз и повысить его точность до такой степени, чтобы он мог садиться на цветы и взлетать с них для избирательного опыления. Более долгосрочная цель — оснастить робота батареями и датчиками для практического использования в реальном мире. В настоящее время робот требует внешнего источника питания, что ограничивает его работу лабораторными условиями.
«Эта новая роботизированная платформа является важным результатом работы нашей группы и ведет ко многим интересным направлениям. Например, оснащение этого робота датчиками, батареями и вычислительными возможностями станет главным направлением в ближайшие три-пять лет», — сказал Чен.













